调整方法症状类型指南
→我想抑制温度振动(狩猎)
→我想抑制超出
→我想加快稳定时间
我想抑制温度振动 (鸭舌帽)
稳定控制时,从抑制振动开始进行调整。
I和D的比例基本上是4:1到6:1,但在极少数情况下D太大。
可以设定。
这会引起振动,因此减小 D。
P的值也是参数,但是通过观察输出的运动,
尝试决定是让 P 变小还是变大。 (详情请观看视频)
我想抑制超出
一旦振动被抑制,我们就可以继续调整超出。
如果P很小,输出就会很高,直到达到设定值的极限。
这会导致超出,所以让我们增加 P。
这时候I和D也常常设得小,所以
尝试以相同的速率增加 P、I 和 D。
另一方面,如果P太大,减少产量的动作就会缓慢。
这也会导致超出,因此请考虑减小 P。
如果发生阻尼振动,
尝试按相同比例增加 I 和 D,而不更改 P。 (详情请观看视频)
想把整点时间提前
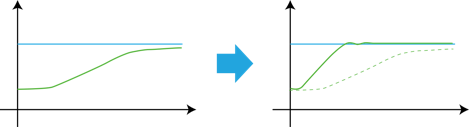
控制在夏季和冬季调整 PID 值、
结算时间可能会延迟。
这不仅仅是因为气温低、
调节器导致输出过低。
有。在这种情况下,你是否按同样的比例减少 I 和 D 呢?
根据程度,尝试按相同比例减少 P、I 和 D。 (更多信息,请参阅视频)
※这只是使用奇诺调节仪的例子。
*请注意,列出的 PID 值基于视频中的实验数据,根据您使用的设备系统,行为可能会有所不同。
*PID初始值请使用“自整定值”或“类似系统的PID值”。
*正文中的“增加”和“减少”字样可以与“当前大小加倍”或“当前大小减半”相同的方式进行调整。
就像秤上的重量一样调整它。
*I与D的基本比例为4:1,请在6:1至10:1范围内调整比例。
调整例1缩小较大振动缩小P
调整例2缩小较大的振动 (2) 增大P
调整例3:同时发生超出时 按相同比例增加P、I、D
调整示例 4 缓慢输出超出减小 P②
调整示例5以相同的比例增加达到目标但有许多绕道的I和D
调整示例6制动器太强!减小重复的原地踏步D
调整示例7以相同的比例减小I和D,因为它们的速度很慢
调整示例8一切都太慢了输出太小了?以相同的比例减小P, I, D

